Fraunhofer-Einrichtung für Individualisierte und Zellbasierte Medizintechnik
Fraunhofer-Einrichtung für Individualisierte und Zellbasierte Medizintechnik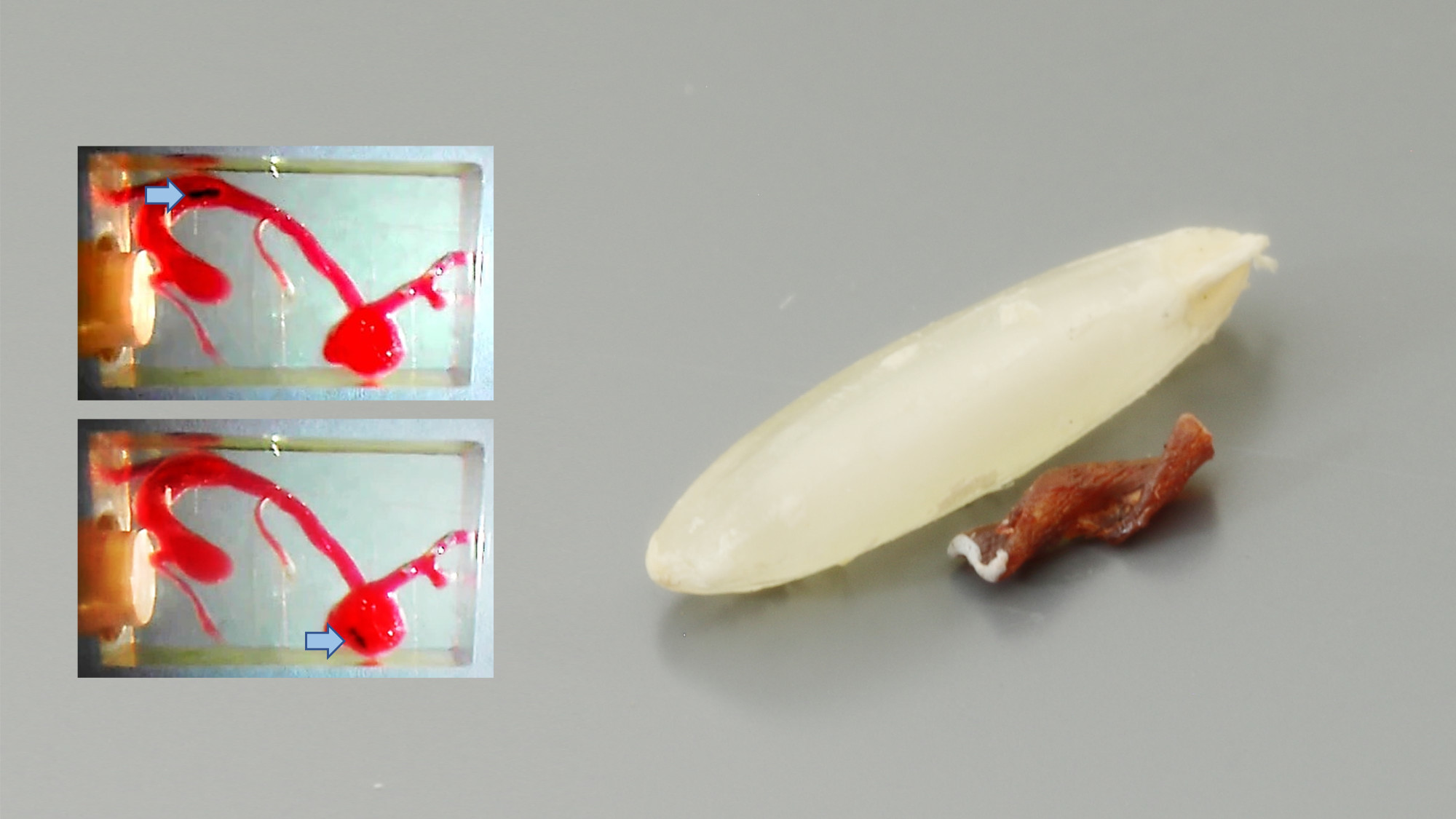
Magnetische U-Boote für die Medizin
Am Institut für Medizintechnik der Universität zu Lübeck und der Fraunhofer-Einrichtung für Individualisierte und Zellbasierte Medizintechnik IMTE werden winzig kleine, schwimmende Roboter entwickelt, die sich in Zukunft wie U-Boote durch den Körper steuern lassen sollen. Mit dieser neuen Behandlungsmöglichkeit sollen Medikamente gezielt zu ihrem Wirkungsort gebracht und Eingriffe an schlecht zugänglichen Bereichen im Körper sehr schonend durchgeführt werden.
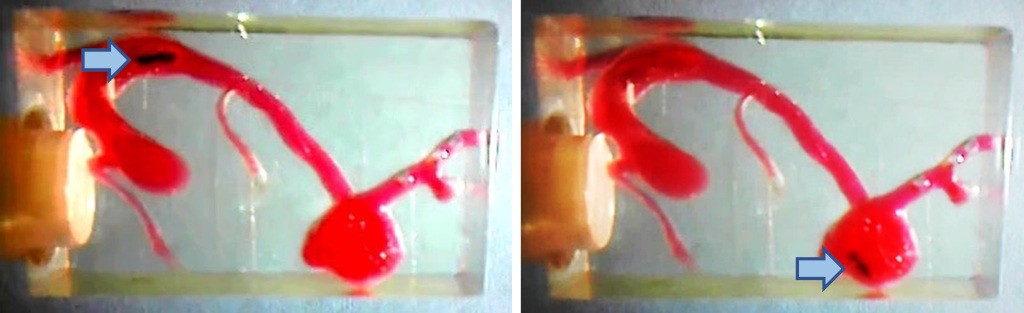
Der entwickelte Mikroroboter ist kleiner als ein Reiskorn, nämlich nur 3 mm lang und 1,2 mm breit. Die Wissenschaftler des Instituts für Medizintechnik und des Fraunhofer IMTE haben gemeinsam der Klinik für Radiologie und Nuklearmedizin und der Klinik für Neuroradiologie des UKSH, Campus Lübeck, einen solchen Mikroroboter mithilfe von Magnetfeldern im Modell durch die mittlere menschliche Hirnarterie zu einem künstlichen Aneurysma gesteuert. Die Originalarbeit wurde in der renommierten Wissenschaftszeitschrift Scientific Reports am 07. Juli 2021 veröffentlicht.
Das Ziel des wissenschaftlichen Teams von Universität, Fraunhofer und Klinik ist es, medizinische Eingriffe und Behandlungen möglichst schonend durchzuführen sowie Medikamente so zu verabreichen, dass sie verstärkt am Ort der Erkrankung wirken. „Wir haben einen magnetischen Mikroroboter entwickelt, der nur mit Magnetfeldern durch den menschlichen Körper gesteuert werden kann. In Zukunft könnte dieser Roboter Medikamente z. B. direkt zu einem Tumor bringen und so Nebenwirkungen von Chemotherapeutika verringern.“, sagt Anna Bakenecker, Wissenschaftliche Mitarbeiterin am Fraunhofer IMTE.
Der magnetische Mikroroboter kann auch zur Behandlung von verstopften Blutgefäßen oder Aneurysmen angewendet werden. Aneurysmen sind Ausstülpungen von Blutgefäßen, die sich immer weiter ausdehnen können, bis die Gefäßwand platzt. Vor allem im Gehirn ist das lebensbedrohlich. Deshalb werden bei der Behandlung von Aneurysmen über einen Katheter kleine Drahtgeflechte in das Aneurysma eingebracht, die zu einer Gerinnung des Bluts in der Aussackung führen und so eine weitere Ausdehnung verhindern. „Wenn ein Mikroroboter ferngesteuert in das Aneurysma gebracht werden und es verschließen kann, wäre das ein großer Fortschritt.“, sagt Dr. Franz Wegner, Radiologe des UKSH.
Der Mikroroboter wurde mittels additiver Fertigung – also dem medizinischen 3D-Druck – hergestellt und mit einem magnetischen Lack beschichtet. Für die Beschichtung wurden magnetische Nanopartikel verwendet, die am Institut für Medizintechnik hergestellt werden. Drehende magnetische Felder bewirken eine Drehung und Vorwärtsbewegung des magnetischen Mikroroboters. „Wir haben ein Modell einer mittleren Hirnarterie aus Patientendaten erstellt, durch das wir den Mikroroboter erfolgreich in ein Aneurysma steuern konnten“, sagt Dr. Hannes Schwenke, Neuroradiologe des UKSH. Dies ist ein wichtiger erster Schritt bevor es in die klinische Anwendung geht.
Um die Bewegung des Mikroroboters nachzuverfolgen, verwendete das Forscherteam die tomographische und echtzeitfähige Bildgebungsmodalität „Magnetpartikelbildgebung“, die auch am Institut für Medizintechnik in Kooperation mit dem Fraunhofer IMTE in Lübeck erforscht wird. Die Magnetpartikelbildgebung visualisiert die magnetischen Nanopartikel, mit denen der Mikroroboter beschichtet ist – und das ohne Strahlung, denn es werden nur Magnetfelder verwendet, die für den Körper unbedenklich sind. Durch die gleichzeitige Steuerung durch Magnetfelder und die Überwachung mit Magnetpartikelbildgebung entsteht eine theranostische Methode, die ganz neue medizinische Anwendungen eröffnet.
Publikation:
A. C. Bakenecker, A. von Gladiss, H. Schwenke, A. Behrends, T. Friedrich, K. Lüdtke-Buzug, A. Neumann, J. Barkhausen, F. Wegner & T. M. Buzug. Navigation of a magnetic micro-robot through a cerebral aneurysm phantom with magnetic particle imaging. Scientific Reports 11, 2021. doi:10.1038/s41598-021-93323-4